
Je lisais récemment un article de Moto-Magazine, sur les aides électroniques sur les motos. Plus que sur les voitures, ces assistances sont nombreuses sur les motos récentes moyennes et haut de gamme. En plus du classique ABS, les motos proposent par exemple des modes de conduites différents (ville, sport, voyage,…) ou de modifier dynamiquement la dureté des suspensions. Au-delà du nombre de systèmes, c’est leurs capacités à se coordonner, sur des délais infimes, qui ont fortement évolué ces dernières années. Le journaliste, motard chevronné, cite un cas où sa moto est partie en travers. Avant qu’il est pu réagir l’assistance avait pris le pas et rétabli la moto dans l’axe.
La conduite automobile est un domaine où l’ergonomie est en constante évolution. Les études dans ce domaine sont nombreuses et certaines aboutissent à des résultats concrets. On peut citer la voiture développer par Google sans conducteur qui est encore expérimentale, mais bien avancée.
D’autres projets ne proposent pas de supprimer le conducteur, mais de l’assister et éventuellement de prendre la main si le danger est trop présent ou trop rapide, comme c’est le cas sur certaines motos. Il se pose alors la question de l’interface entre l’homme et la machine.
DAARIA : Driver Assistance by Augmented Reality for Intelligent Automotive
Une étude récente, publié lors du congrès IEEE Intelligent Vehicules Symposium, aborde le sujet :
Taking into account the drivers’state is a major challenge for designing new advanced driver assistance systems. In this paper we present a driver assistance system strongly cou- pled to the user. DAARIA 1 for Driver Assistance by Augmented Reality for Intelligent Automotive is an augmented reality interface informed by a several sensors. The detection has two focus : one is the obstacles position and the quantification of their dangerousness. The other is the driver behavior. Via a suitable visualization metaphor the driver can at any time perceive the location of relevant hazards while keeping his eyes ont the road. First results show that our method could be applied to vehicle but also to aerospace, fluvial or sea navigation.
L’étude présente donc un système complexe de prise en compte de l’utilisateur et d’affichage tête haute des informations liées à la détection d’obstacles et leur potentielle dangerosité. La présentation prend la forme suivante :
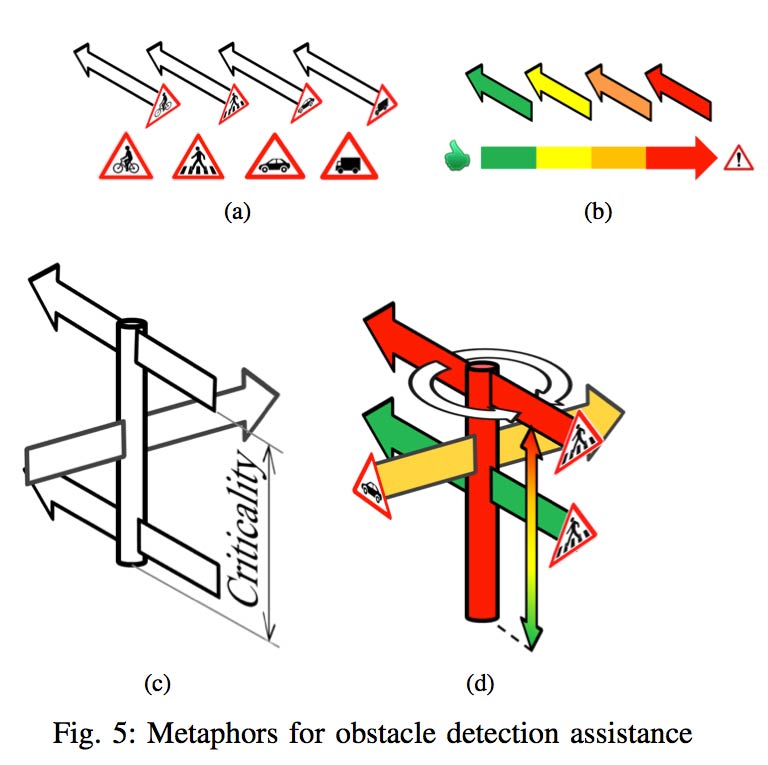
Une flèche indique la direction du danger, ainsi qu’un niveau de dangerosité.
Un système complexe d’eyetracking et d’affichage tête haute permet au conducteur de voir les informations sans quitter les yeux de la route. En situation réelle cela donne la présentation suivante :

Exemple de l’Interface DIAARA
L’étude conclut que le système fonctionne malgré les difficultés techniques rencontrées, mais qu’il est nécessaire d’étudier 3 pistes complémentaires concernant :
- les objets détectés et l’attention du conducteur
- l’amélioration de la métaphore
- l’analyse des performances dans des situations critiques en utilisant un simulateur de conduite.
Cette étude est particulièrement intéressante, mais il existe déjà un système aussi performant et beaucoup moins coûteux.
le IIAAC, pour Interface innovante et apprenante d’assistance la conduite.
Je vais donc vous présenter brièvement ce système.
Les capacités
Ce moyen de transport individuel (ou collectif sous certaines conditions) dispose déjà de nombreuses fonctions.
- Il détecte les objets potentiellement dangereux sur un angle 320° à l’arrêt et 360° en mouvement.
- La détection ne porte pas uniquement sur les modalités visuelles, mais aussi sur la modalité auditive et dans certains cas sur les modalités olfactives, par exemple pour les animaux sauvages susceptibles de traverser la route.
- Le système est en mesure de détecter des zones de danger potentielles comme les sortie d’écoles, les portails ou les chemins secondaires.
- Suivant le mode de détection, la métaphore utilisée pour indiquer le problème diffère. Elle est d’ailleurs assez proche des flèches utilisées dans l’étude précédente.
- Le système réagit automatiquement en cas de danger et adopte une trajectoire permettant dans la mesure du possible d’éviter l’obstacle.
- Ce moyen transport est aussi capable de passer au-dessus de l’objet détecté à une hauteur variant de 0,80 à 1,80 mètre suivant les modèles et la vitesse initiale.
- Le système prend aussi en compte l’attitude corporelle du conducteur pour adapter la réaction en cas de danger, modifier la direction ou ralentir la vitesse de déplacement en cas de défaillance du conducteur.
- Le système de GPS intégré peut déclencher automatiquement un mode “retour à la maison” en cas d’indisponibilité du conducteur.
L’interface
Au-delà de ces fonctions de bases, l’interface proposée par ce moyen de transport, est une interface apprenante qui est donc capable s’adapter aux capacités du ou des conducteurs, avec un système de reconnaissance automatique et d’évoluer dans le temps. Comme pour l’automobile, la phase d’apprentissage est relativement longue, mais pendant cette période le système est suffisamment performant pour éviter tous les obstacles présents et réduire considérablement les risques de collisions.
L’interface de conduite de ce moyen de transport est multimodale. Elle prend en compte aussi bien les indications auditives de manière très fines (claquement de langue, verbes d’actions, intonation descendante ou montante) que des indications corporelles : position des mains, des jambes, mais aussi poids du corps, position du bassin.
Le système d’eyetracking intégré permet aussi “d’aller là où l’on regarde”, ce qui peut parfois poser des soucis quand cette information est contradictoire avec le reste des informations transmises au système. On observe souvent dans ce cas, une séparation des vecteurs de déplacements du conducteur et du moyen de transport.
Le coût
Le coût d’un tel système de transport, à l’achat, va de 800 € à 15 000 € pour les modèles classiques, suivant les options, la qualité et le degré d’apprentissage de l’interface apprenante. Des modèles de luxes ou de compétitions existent avec des prix bien plus élevés de 100 000 € à plusieurs millions d’euros.
Le coût d’entretiens est assez élevé, car il faut un entretien quotidien. On comptera entre 150 € en province, jusqu’à 1000 € par mois en région parisienne.
Les illustrations
Quelques illustrations de ce moyen de transport et l’interface apprenante :
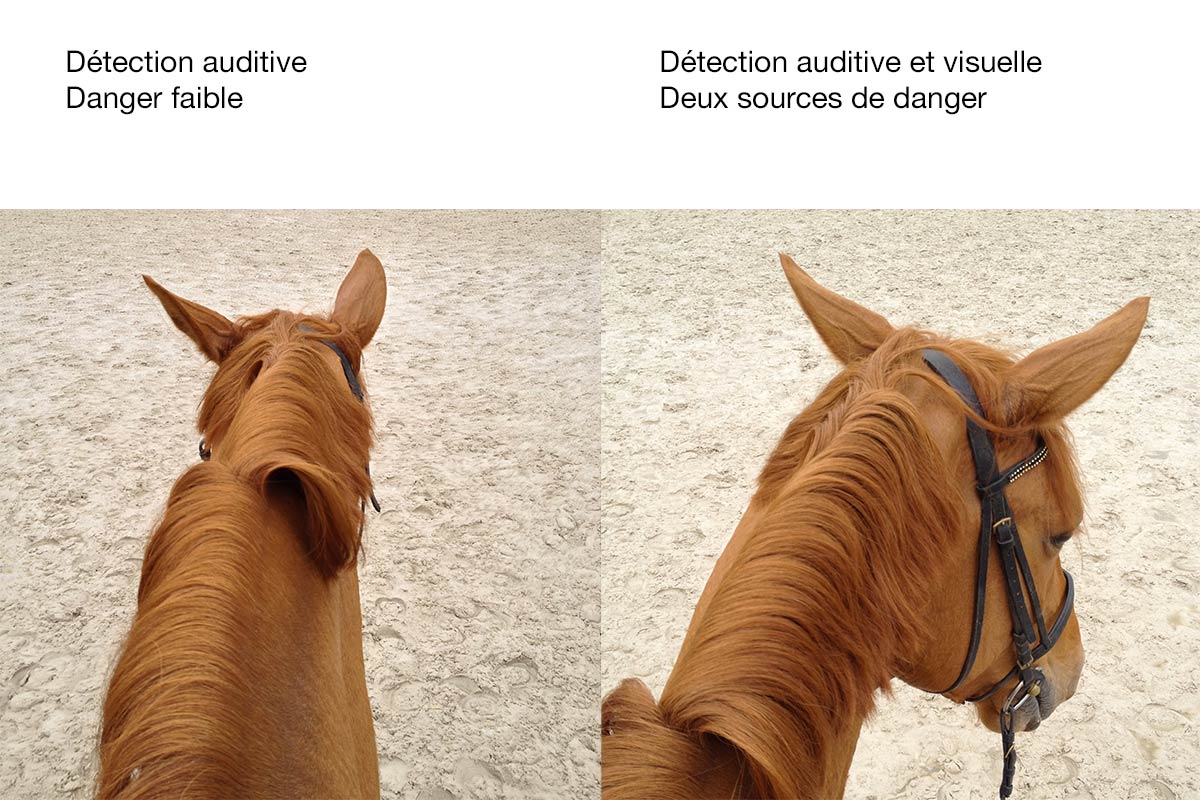
Détection des sources de dangers.
En situations,

Détection des zones de dangers de potentiel : portail et sortie de voitures.

Croisement de véhicules, non potentiellement dangereux.
Évitement d’un obstacle en passant au-dessus.

Cheval à l’obstacle.
Conclusions
Ce billet a été écrit un 1er avril sur la base d’une idée de Donald A. Norman.
Bibliographie :
- George P., Thouvenin I., Fremont V., Cherfaoui V. DAARIA : Driver Assistance by Augmented Reality for Intelligent Automotive, IEEE Intelligent Vehicules Symposium, Alcalá de Henares, Spain, 2012,pages 1043-1048.
- Donald A. Norman, The Design of Future Things, http://www.amazon.fr/gp/product/0465002285/
- Illustration « à la une » : Hugh Ferries